I wanted a system to detect the passage of vehicule that is cheap and
rapidly deployable. A microphone was used as sensor because the sound of a
vehicle is very recognizable. Of course there are others ways available to
detect a vehicle (pneumatic road tube, piezoelectric sensor, inductive
loop, magnetic sensor, microwave sensor, infrared sensor, cameras) but a
microphone is very cheap, can be found in mass market, is very fast to
install and contrary to a camera, it works at night.
System setup
The recording is done via a single microphone connected to a
Raspberry Pi. The electric current is supplied to the Raspberry Pi by an
external USB battery. The running time depends of the capacity of the
battery, in the current setup, it took 4 hours to empty the battery with
the Raspberry Pi’s CPU running at full speed. The microphone is a Trust
Micro USB microphone which come with an USB sound card. This external sound
card is necessary because the Raspberry Pi’s sound card hasn't any jack input. In this
experiment, the system is connected with WiFi and is remotely connected
with ssh. To protect the system in rain conditions, an upside down box open
on one side permit the microphone to capture the sound and protect it from
water
 Figure 1: Installed setup.
Figure 1: Installed setup.
Audio profile
Wavelet transform on recorded audio, shows that the background noise like
winds is mainly lowfrequencies while the passage of a vehicle generate
harmonics and high frequencies. The wavelettransform were computed using
Morlet-Wavelet between 16Hz and 2000Hz on a 4 seconds window.
The figure 2 shows the wavelet transform when a vehicle pass in front of the
microphone and the figure 3 shows the wavelet transform of the background only.
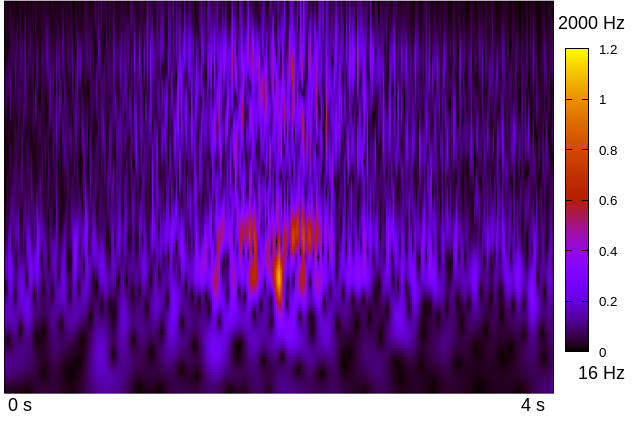 Figure 2: Wavelet transform (vehicle passing)
Figure 2: Wavelet transform (vehicle passing)
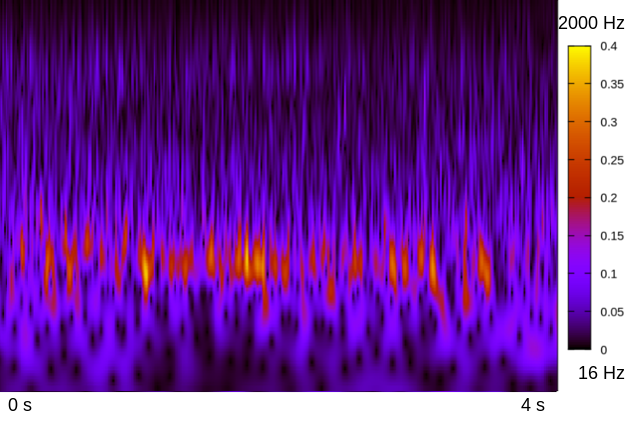 Figure 3: Wavelet transform (noise)
Figure 3: Wavelet transform (noise)
Vehicle detection
Each 500 ms, the system analyze a 44100Hz audio signal on a 4 seconds
window. The first step of the signal processing consist in a fast analysis
to determines if the signal worth being analyzed further to find a vehicle.
This is done by dividing the signal in 500 samples then by computing the
sound power 25 samples by 25 samples. By experimenting, it was found that
the power above a threshold of 0.0001 (dimensionless value that comes from the
microphone) is enough to select all passing vehicle.
(The amplitude measured is comprise between -1 and 1, respectively
the minimum and maximal amplitude measurable by the microphone). If that
prerequisite test is passed, the full 4 second signal is processed by
another function to analyze it further.
To determine if there is a vehicle during these 4 seconds of recorded sound,
the first step is to remove the noise. Assuming that the noise is stationary, it
is removed from the signal $S(\omega)$ by using a Wiener filter $W(\omega)$ with a pre-recorded
signal when a vehicle pass just in front of the microphone $V(\omega)$ and a pre-recorded
signal of the noise $N(\omega)$. This filter is applied to the signal $S(\omega)$ to obtains the
signal $\tilde S(\omega)$
$$W(\omega) = \frac{V(\omega)}{V(\omega) + N(\omega)}$$
$$\tilde {S}(\omega) = W(\omega) \cdot S(\omega)$$
Once denoised, the signal is cut in many windows of 1000 samples each. Then for
each window, an FFT is applied. To avoid artifacts by doing the FFT directly on
a squared window, a Hamming window is first computed to avoid brutal change at
the border. For each FFT, the median between the lowest and the highest
frequency whose amplitude is above a threshold is stored in an array. This
gives the variation of the median frequency in the signal. The result is then
smoothed with a Gaussian. When a vehicle pass in front of the microphone, there
is a high peak of median frequency. To detect these peaks, the software detects
the sign changes in derivative to determines if it’s a peak or not and select
only the 3 highest peaks in the window.
In the figure 4, the big peaks over 1400Hz corresponds
to the passage of a vehicle, the 4 peaks at 70s, 80s and 170s and 220s are also
the result from a passage of a vehicle but than can be hear from a near roads.
Another used property is the power of the signal $x$ when a vehicle pass in
front of the micro-phone. For each windows of 1000 samples, the power is
computed using: $$\frac{1}{1000} \sum_{i=0}^{1000} x[i]^2$$ When a vehicle pass
in front of the microphone there is a clear peak as show in figure 5.
The power alone is not sufficient to determine if there is a vehicle or not (there are big peaks at
70s and 250s even if there is no vehicle), but it can be used to determines the
power threshold from where a vehicle can be found.
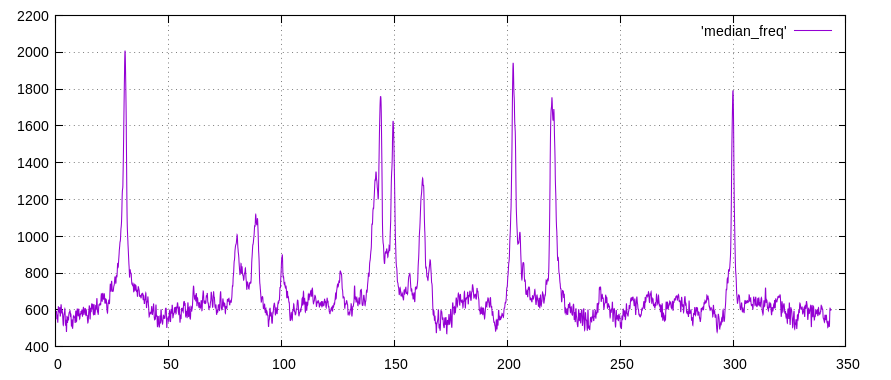 Figure 4: Computed median frequency over time of a 350s record using a window of 1000samples.
Figure 4: Computed median frequency over time of a 350s record using a window of 1000samples.
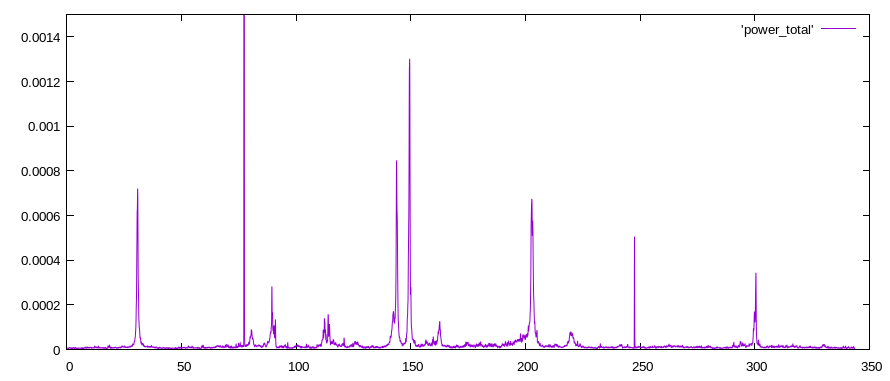 Figure 5: Computed power of a 350s record (dimensionless measure from mic).
Figure 5: Computed power of a 350s record (dimensionless measure from mic).
The same computations are done with a reference signal of a passing vehicle and
the similarity is computed by the cross-correlation of the median frequency and
the power with the following formula. $$\max_n \frac{\sum_i s_1[i+n] \cdot
s_2[i]}{\sum_i s_2[i]^2}$$ The correlation of the signal $s_1$ with the
reference signal $s_2$ with the offset $n$ that give the best result is keep.
Note that in the implementation it look for the best correlation around the
peaks of power.
The combined results of the correlation of power over time, the correlation of
median frequency over time and the peak value of the median frequency gives a
very good ways to determine if there is a vehicle or not.
Results
The dispositif was tested in 3 different places with different wind conditions.
Because wind, and the majority of the encountered sources of noise are found in
frequencies lower than the important signal, they don’t influence much the
result. In rain conditions, the signal is more noisy, but the quality of the
signal is still enough good so the system still works accurately (also, the
hardware needs to be protected from water with a box). If the system is running
near another road, it may count also vehicles on the other road if they can be
hear sufficiently loud. The following table shows the results and error rate.
| All combined | Vehicle | No Vehicle |
|---|---|---|
| Detected | 40 | 4 |
| Not Detected | 6 | n.d. |
| Bad weather | Vehicle | No Vehicle |
|---|---|---|
| Detected | 15 | 3 |
| Not Detected | 0 | n.d. |